위험지역을 탐사하는 소형 비행로봇 '호버링'

한국생산기술연구원(www.kitech.re.kr)의 지능운동연구팀(박상덕, 강민성, 황세희, 지상기, 김덕후, 조국)은 실내 외에서 자율 비행하면서 화재 및 재난 등의 위험요소를 감시, 추적해 정보를 제공하는 소형 무인 비행로봇 '호버링(가칭:Hovering) 로봇'을 소개했다.

소형비행체 설계기법과 각종 센서기술을 접목한 '호버링 로봇'은 유인항공기에 비해 가격이 저렴하며 위험도가 높은 지역과 좁은 공간에서도 작업이 용이하고 조작이 간편한 것이 특징이다.
산불, 건물화재 오염지역 탐사 등 민간목적의 사용은 물론, 군사적인 용도로도 활용 가능하다.
연구팀은 각종 재난상황의 감시와 정찰을 위해 개인이 운반 가능한 소형 동축로터(Coaxial Rotor) 비행로봇의 플랫폼을 개발하고 공중에 정지해 각종 탐사활동을 할 수 있는 제어기를 개발했다.

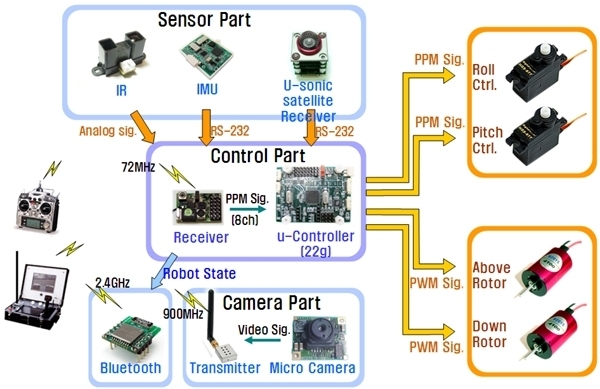
‘호버링 로봇’은 주 제어기로 16비트 마이크로컨트롤러를 사용했으며, 자세측정 센서로는 소형 관성측정장치(Microinfinity IMU), 고도측정 센서로 적외선 센서 그리고 위치 인식을 위해 초음파 발신기 및 통신모듈를 탑재했다.
위, 아래 두 개로 장착된 직경 53cm의 로터는 상하 반대로 회전하며 경량화를 위해 BLDC모터를 장착했다.



[제품 사양]
|
Diameter |
53cm |
|
Weight |
754g |
|
Max. Thrust |
1920g |
|
Duration |
10min |

SEOUL, Korea (AVING) --
'상품 현미경 > ┃ 새론 상품' 카테고리의 다른 글
| 사계절 어디서나 탈수 있는 보드 (0) | 2009.06.01 |
|---|---|
| 20시간을 밝혀주는 태양광 충전 랜턴 (0) | 2009.05.27 |
| 조각하고 걸어다니는 로봇 (0) | 2009.03.24 |
| 누구나 댄스왕이 될 수 있게 하는 `댄스복` (0) | 2009.02.16 |
| 자기 몸 27배 점프 신기록 `메뚜기 로봇` (0) | 2009.02.15 |